作者: Kevin,[email protected]
ScopeArt按語:
抖動測量一直被稱為示波器測試測量的*高境界,。傳統(tǒng)*直觀的抖動測量方法是利用余輝來查看波形的變化。后來演變?yōu)楦叩葦?shù)學(xué)概率統(tǒng)計上的艱深問題,,抖動測量結(jié)果準還是不準的問題就于是變得更加復(fù)雜,。
時鐘的特性可以用頻率計測量頻率的穩(wěn)定度,用頻譜儀測量相噪,,用示波器測量TIE抖動,、周期抖動、cycle-cycle抖動,。但是時域測量方法和頻域測量方法的原理分別是什么,? TIE抖動和相噪抖動之間的關(guān)系到底是怎么推導(dǎo)的呢? ScopeArt先生就常遇到類似的問題,,為此,,特向本文作者主動邀稿。 作者是高人,,但很低調(diào),。他為此文花費了很多時間,*終奉獻給大家的這篇文章很干貨,。希望對仍然糾結(jié)在抖動的迷霧中的朋友們有所啟發(fā),。
———————————————————
抖動是衡量時鐘性能的重要指標,抖動一般定義為信號在某特定時刻相對于其理想位置的短期偏移,。這個短期偏移在時域的表現(xiàn)形式為抖動(下文的抖動專指時域抖動),,在頻域的表現(xiàn)形式為相噪。本文主要探討下時鐘抖動和相噪以及其測量方法,以及兩者之間的關(guān)系,。
1 抖動介紹
抖動是對時域信號的測量結(jié)果,,反映了信號邊沿相對其理想位置偏離了多少。抖動有兩種主要成分:確定性抖動和隨機抖動,。確定性抖動是可以重復(fù)和預(yù)測的,,其峰峰值是有界的,通常意義上的DJ是指其pk-pk值,;隨機抖動是不能預(yù)測的定時噪聲,,分析時一般使用高斯分布來近似表征,理論上可以偏離中間值無限大,,所以隨機抖動是沒有峰到峰邊界的,,通常意義上的RJ指標是指其RMS值,可以根據(jù)其RMS值推算其在一定誤碼率時的值,。目前*常用的分析方法是使用雙狄拉克模型,。該模型假定概率密度函數(shù)兩側(cè)的尾部是服從高斯分布的,高斯分布很容易模擬,,并且可以向下推算出較低的概率分布,。總抖動是RJ和DJ概率密度函數(shù)的卷積,。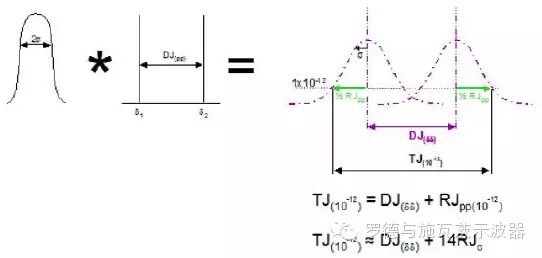
但是,,業(yè)界對于高斯分布能否**地描繪隨機抖動直方圖的尾部還存在爭議。真正的隨機抖動是遵守高斯分布的,,但實際的測量中多個低幅度的DJ會卷積到一個分布函數(shù),,這導(dǎo)致測量出的概率密度分布的中心接近高斯分布,而尾部卻夾雜了一些DJ,。所以,,真正的RJ可能只占高斯模型的抖動的一部分,測量中RJ可能被放大了,,同時總抖動也會被放大,。
2 抖動測量
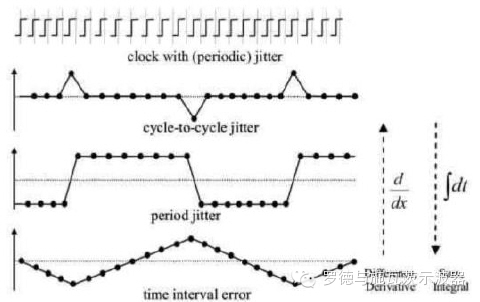
時鐘抖動通常有三種測量方法,對應(yīng)于TIE(Time Interval Error 時間間隔誤差),、period(周期抖動)和Cycle-Cycle(相鄰周期抖動)三種抖動指標,。
TIE抖動(時間間隔誤差),以被測時鐘沿與理想時鐘沿之間的時間差為樣本,,即以圖中的TIEn為樣本,,通過對很多個樣本進行統(tǒng)計分析,表征時鐘沿與理想時鐘沿偏離值的變化,、分布情況,,如下圖所示: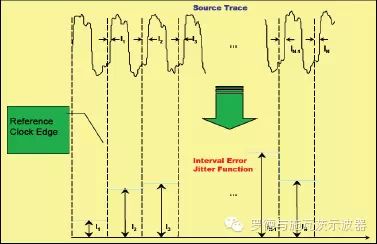
Period Jitter(周期抖動),,以時鐘信號的周期做樣本,即以圖中的Pn做樣本,,通過對很多個樣本進行統(tǒng)計分析,,表征時鐘信號周期Pn的變化、分布情況,,對于保證數(shù)字系統(tǒng)中的建立保持時間規(guī)范很有意義,。如下圖所示: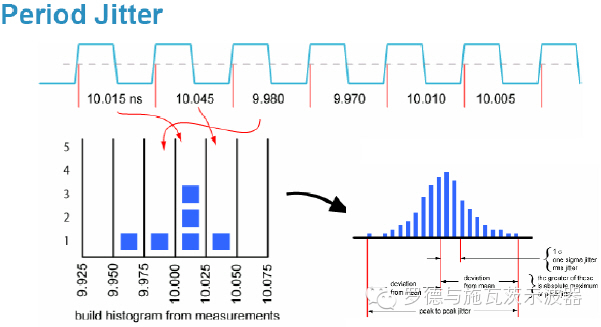
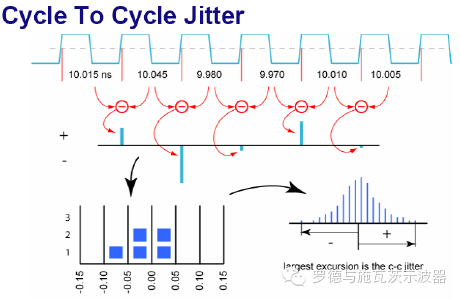
Cycle-Cycle Jitter(Cycle-Cycle抖動),以時鐘信號相鄰周期的差值做樣本,,即以圖中的Cn做樣本,,通過對很多個樣本(1K~10K)進行統(tǒng)計分析,表征時鐘信號相鄰周期變化值的變化,、分布情況,,一般用于需要限制頻率突變的場合。如下圖所示:
TIE,、Jperiod和Jcycle-cycle三種抖動指標之間的關(guān)系如下:
TIE的微分可以得到周期抖動,。
其中,Δtpn為周期抖動,, tn為實際周期,,T0為理想周期,ΔtIEn為TIE抖動,。
周期抖動(period jitter)的微分可以得到cycle-cycle jitter,。
其中,Δtcn為周期抖動,, tn為實際周期,Δtpn為周期抖動,。
三者的關(guān)系可以用下圖表示:
3 相噪介紹
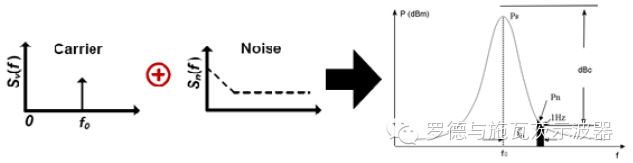
相位噪聲反映的是單載波信號的頻譜純度,,如果沒有相位噪聲,信號的所有功率都應(yīng)集中在其振蕩頻率f0處(下圖左Carrier),,這個理想信號用Asin(ωt)表示,。由于存在相位噪聲(下圖左Noise),相當于在理想信號上調(diào)制了一個Φ(t)相位信號,,此時整個信號表示為Asin(ωt+Φ(t)),。在頻譜上體現(xiàn)為一部分功率擴展到相鄰的頻率中去,形成邊帶(下圖右),。相噪定義為單邊帶某一給定偏移頻率fn處1Hz帶寬內(nèi)的功率Pn與信號總功率Ps比值的對數(shù),,即 10lg(Pn/Ps),相噪以dBc/Hz@fn為單位來表示,。這里dBc的含義是某頻點功率與信號總功率的比值(下圖右),,對應(yīng)于時鐘相位偏移與時鐘周期的比值。
4 相噪測量
相噪測量一般使用相噪儀進行,由于技術(shù)發(fā)展,,現(xiàn)在相噪儀不僅可以測量相噪,,還可以分析電源等其它信號的噪聲,所以相噪儀也稱為信號分析儀,。相噪儀的原理與頻譜儀類似,,但是更加精密,并增加了一些特定的分析功能,,因此使用頻譜儀也可以粗略地測試相噪,。相噪儀測試相噪有多種測量方法,但使用*廣泛的還是頻譜分析法和鑒相法這兩種測量原理,。
4.1 頻譜分析法
頻譜分析法是對時鐘信號進行頻譜分析,,先測量信號總功率Ps,再測量某一偏移頻率出的功率Pn,,再經(jīng)過計算便可得到該被測時鐘的單邊帶相位噪聲,。頻譜分析法是一種簡單直接的相噪分析技術(shù),適宜于測量漂移較小但相位噪聲相對較高的信號,;但是頻譜分析法不能分辨出調(diào)幅噪聲和相位噪聲,,測試波形不太**的時鐘信號相噪時會存在較大誤差;另外由于頻譜儀的動態(tài)范圍和*小分辨帶寬的限制,,測量精度受限,。
4.2 鑒相法
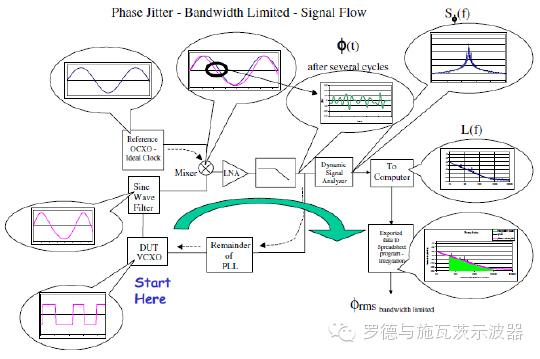
鑒相法采用外差混頻方式將被測時鐘信號轉(zhuǎn)化至中頻,在中頻用一個鎖相環(huán)提取出被測時鐘信號的載波信號,,再將該信號與被測信號正交鑒相,,從而提取被測時鐘信號的相位噪聲Φ(t) ,處理后得到頻域相噪SΦ(f) ,,進一步積分可以得到L(f) ,,L(f)對應(yīng)于RMS相噪。鑒相法的優(yōu)點是動態(tài)范圍大,,相噪電平采用低噪放大器提高靈敏度,,并且可以分辨調(diào)幅噪聲和相位噪聲。
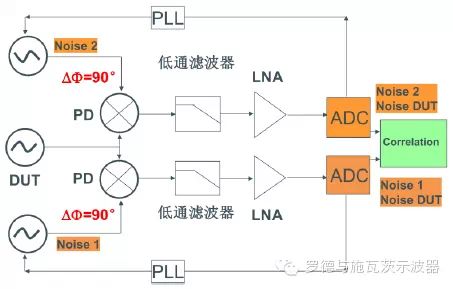
另外,,鑒相法還可以進一步增加互相關(guān)技術(shù)來增加靈敏度,。互相關(guān)技術(shù)是將兩路鑒相法組合起來,,對其輸出信號執(zhí)行互相關(guān)操作,。待測時鐘的噪聲通過每路通道仍然是相關(guān)的,不受互相關(guān)影響,;每路通道內(nèi)部產(chǎn)生的噪聲是不相關(guān)的,,被互相關(guān)操作抑制,。引入互相關(guān)技術(shù)后無需特別精密的器件就可以實現(xiàn)更高的測量靈敏度。
5 抖動與相噪分析及轉(zhuǎn)換
5.1 相噪轉(zhuǎn)化為抖動的計算
相位噪聲到抖動的轉(zhuǎn)化,,可以有如下的公式推導(dǎo),。
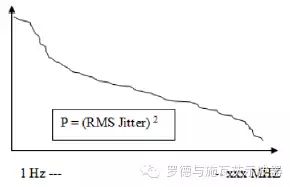
頻率f1到f2的相噪頻譜積分可得到相噪Φ(t)的RMS值的平方(RMSΦ(t))2:

其中,SΦ(t)為相噪頻譜,,L(f) 為積分后的相噪,。由于相噪曲線為不規(guī)則曲線,運算量很大,,實際測量時該積分運算由儀器完成,。
總的信號可以表示為以下函數(shù):

其中C(t)表示總的信號,Φ(t)表示調(diào)制其上的相位噪聲,。將Φ(t)與周期/頻率結(jié)合起來可以得到TIE抖動的表示為:
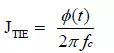
另有,,TIE抖動的RMS值為:

其中,L(f)是關(guān)心頻段內(nèi)相噪的積分,。
從下面的測量可以得到10Hz到30MHz的積分相噪是-51.5dBc,,以該測量為例計算:

UI=1/999.999992MHz≈1ns
RMS JTIE=3.763mrad*1ns/2π=0.215° *1ns/360°=0.5972ps

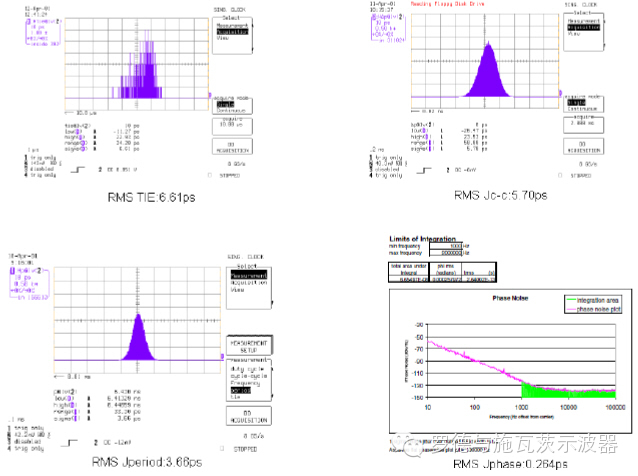
5.2 相噪與抖動測量值的比較
下面四幅圖分別是時域的TIE、Jc-c,、Jperiod和頻域的相噪,,可以看到四個測量值有很大的差異,原因可能有以下幾點:
? 相噪測試時設(shè)定了具體的積分帶寬,,這個帶寬一般在幾十兆Hz以內(nèi),。而時域抖動測試并沒有帶寬限制,其帶寬限制只取決于示波器儀器本身,;
? 儀器在測量過程中引入噪聲,,這里示波器的底噪大于相噪儀,引入的噪聲會更大些,;
? 相噪儀只是觀察到每一個時刻的噪聲,,示波器可以累積觀察一段時間的噪聲;
? 相噪測試時以輸入信號本身的頻率作為基頻,,忽略了信號的頻偏;而示波器測量TIE時會以理想時鐘作為參考,。
6 小結(jié)
抖動測量就像是盲人摸象,,每種方法都有其局限性。工程師需要深入了解系統(tǒng)的抖動的要求,,以及各種抖動測量技術(shù)的原理和優(yōu)劣,,根據(jù)需要選擇合適的抖動測量評估方法。


蘇州德計儀器儀表有限公司
聯(lián)系人:鄒德標
手機:13915418480
QQ:2850137550
電話:0512-68790450
傳真:0512-68566540
地址:蘇州市吳中區(qū)蘇蠡路41號港龍財智國際C1313室
郵箱:[email protected]